Introducción
La localización de frutos en los arboles, y su automatización para encontrarlos y desechar los que toda via no estan o tienen algun defecto.
Las características principales de estos enfoques se describen, prestando especial atención a los sensores y accesorios utilizados para la captura de imágenes de árboles, la estrategia de procesamiento de imagen que se utiliza para detectar la fruta, y los resultados obtenidos en términos de las correctas / falso tasas de detección y la capacidad de detectar fruta independiente de su madurez etapa. La mayoría de estos trabajos utilizan cámaras CCD para capturar las imágenes y el uso de locales o una forma basada en el análisis para detectar la fruta. Los sistemas que utilizan el análisis local, como la intensidad o clasificación color del píxel, para permitir una rápida detección y fueron capaces de detectar la fruta en concreto estados de madurez, la fruta es decir, con un color diferente al del fondo
Los métodos que utilizan imágenes de rango y análisis de la forma son capaces de detectar la fruta de cualquier color, no generar falsas alarmas y dio información precisa sobre la fruta posición tridimensional. A pesar de estos resultados prometedores, el problema de la oclusión total de la fruta limita la cantidad de fruta que pueden ser cosechados, que van desde 40 a 100% de fruta total, dependiendo de la fructificación y las condiciones de visión. Este hecho afecta gravemente a la viabilidad de los robots de cosecha futuros que dependen de imágenes que no contienen un alto porcentaje de fruta visible. Por lo tanto, las nuevas técnicas a reducir la oclusión total debe ser estudiada con el fin de hacer que el proceso sea factible. Palabras clave: recolección automática, visión por ordenador, la localización de fruta, color y forma análisis.
Para la recolección de fruta delicada sin los inconvenientes de operación manualpuede ser el uso de sistemas automáticos capaces de realizar una colección individualizada, utilizandoestrategias selectivas para cosechar la fruta sólo con las condiciones deseadas, y al mismo tiempo,proporcionando un sistema capaz de trabajar 24 horas al día. Para obtener este sistema automático haytres problemas principales que hay que resolver:
- la orientación del robot a través del cultivo,
- los localización y caracterización de la fruta en el árbol
- el agarre y el desprendimiento de la cada pieza
Objetivo
Lo que se tiene que cumplir son dos objetivos pricipales y para cumplir esos objetivos, el documento aborda los siguientes temas: (a) la descripción de los principales enfoques desarrollados por otros autores para automatizar la detección y localización de frutas para fines de aprovechamiento automáticos, y (b) el análisis y la discusión de estos resultados para deducir lo que los principales logros han sido obtenidos, ¿qué problemas restantes aún no se han resuelto lo que podría limitar las aplicaciones prácticas, los esfuerzos de investigación y lo que aún se necesitan para tener éxito en el desarrollo de sistemas de detección automática de frutas.
EXAMEN DE VISIÓN ARTIFICIAL PARA DETECCIÓN DE FRUTA
Un robot recogiendo la cosecha de fruta de forma individualizada debe ser capaz de guiar su brazo mecánico para cada pieza de fruta en el árbol. Por lo tanto, la ubicación fruta tridimensional debe ser calculada. Si una recolección selectiva es necesaria, no sólo su posición, pero algunas características del fruto como de su radio y la madurez tiene que ser estimado. Esta revisión se presentan en orden cronológico para mostrar la evolución de la investigación en esta área.La primera referencia teniendo en cuenta la detección automática de frutos data de 1968 (Schertz y Brown, 1968). En este trabajo Schertz y Brown sugirieron que la ubicación de las frutas puede ser determinado por la información fotométrica, específicamente utilizando las diferencias de reflectividad de la luz entre las hojas y frutas en la porción visible o infrarroja del espectro electromagnético.
 El
sistema de visión se basan en el análisis de tres bandas espectrales
elegidas después de un estudio de espectros-fotometría en el visible y
el infrarrojo cercano bandas. Este
estudio reveló que había una banda espectral estrecha centrado en 950
nm donde las hojas del manzano y variedades de manzanas (varios Golden
Delicious, Red Delicious y Granny Smith, que tienen un color
amarillo-verde, rojo y verde, respectivamente) tenían reflectividad
similar. Esta
característica se utiliza para hacer que el sistema bastante insensible
a cambios de iluminación haciendo referencia a las imágenes obtenidas
en 650 y 550 nm a 950 nm de la imagen. Las
dos relaciones computarizada fueron empleados para decidir qué píxeles
pertenecía a una fruta y que podrían ser clasificados como puntos de
hoja. Con esta estrategia fue posible reconocer manzanas maduras incluso verdes. La
extensión de este trabajo a otros tipos de manzanas o árboles
individuales involucrados estudios espectrales para cada problema de
reconocimiento especial, y este hechoindicó que el sistema es muy sensible a las condiciones de cosecha cambiantes.
El
sistema de visión se basan en el análisis de tres bandas espectrales
elegidas después de un estudio de espectros-fotometría en el visible y
el infrarrojo cercano bandas. Este
estudio reveló que había una banda espectral estrecha centrado en 950
nm donde las hojas del manzano y variedades de manzanas (varios Golden
Delicious, Red Delicious y Granny Smith, que tienen un color
amarillo-verde, rojo y verde, respectivamente) tenían reflectividad
similar. Esta
característica se utiliza para hacer que el sistema bastante insensible
a cambios de iluminación haciendo referencia a las imágenes obtenidas
en 650 y 550 nm a 950 nm de la imagen. Las
dos relaciones computarizada fueron empleados para decidir qué píxeles
pertenecía a una fruta y que podrían ser clasificados como puntos de
hoja. Con esta estrategia fue posible reconocer manzanas maduras incluso verdes. La
extensión de este trabajo a otros tipos de manzanas o árboles
individuales involucrados estudios espectrales para cada problema de
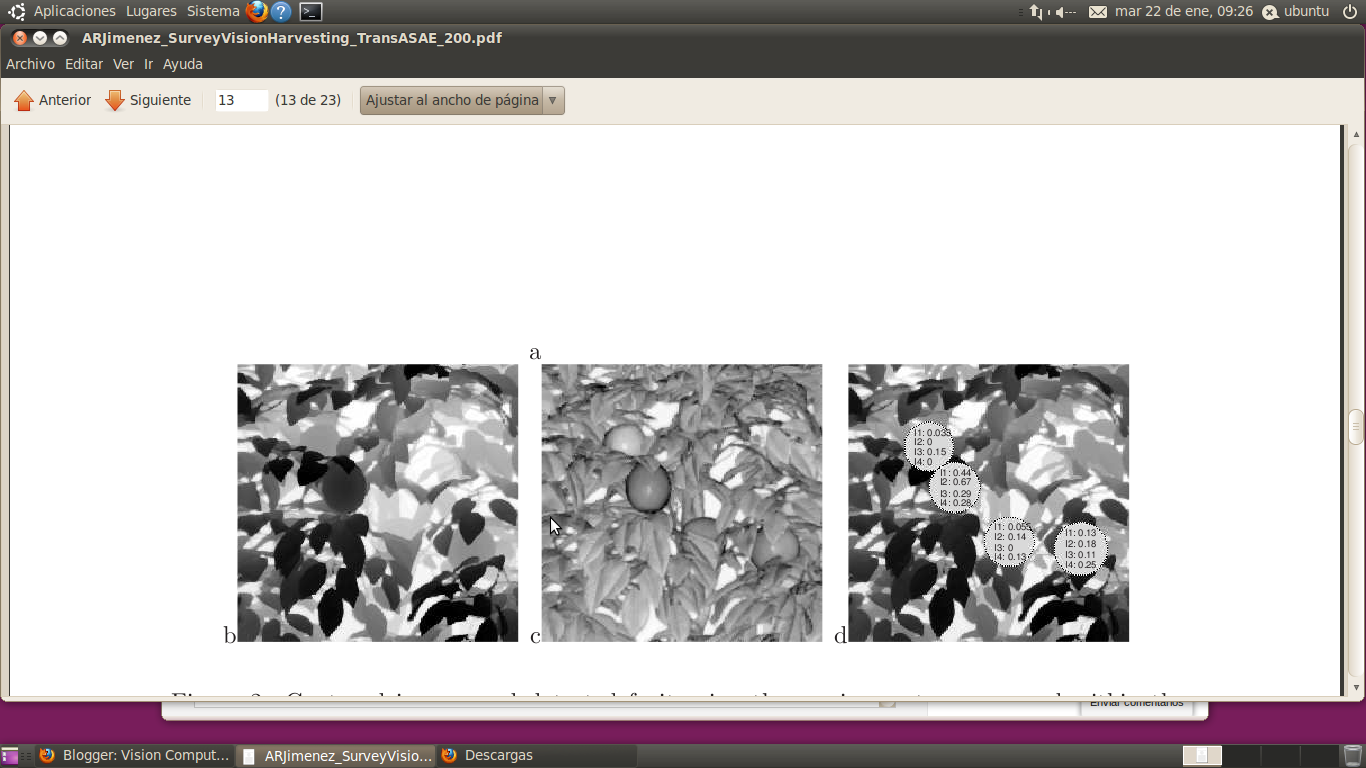
reconocimiento especial, y este hechoindicó que el sistema es muy sensible a las condiciones de cosecha cambiantes. Estos datos se denomina reflectancia y se utilizó junto con la gamadatos para analizar no sólo la forma, sino propiedades ópticas del objeto y el objeto distribuciones espaciales(Fig. 2). La estrategia se centró en el reconocimiento reconocimiento general objeto esférico desde naranjas,manzanas, melocotones o fruta similar puede ser modelado como esferas. La aproximación propuesta se basa enla generación de un conjunto de primitivas que eran característicos o muy probable que pertenecen a esféricaobjetos. Estas primitivas capturar características que mienten en las diferentes áreas de una esfera, por lo tanto parcialoclusiones de la fruta podría reducir las primitivas capturadas pero no la capacidad para detectar la fruta.Cuatro primitivas diferentes, llamados contorno, corona, convexa y la reflectividad, se utilizaron para estimarlos parámetros de la esfera: 3D-posición, el radio y la reflectividad. Las pruebas se realizaron usando tantoconfiguraciones de árboles artificiales y naturales, informando de que aproximadamente el 80% de los frutos estaban visiblescorrectamente detectado y caracterizado. No se encontraron falsas detecciones
sensores maging
Los sensores básicos empleados en estudios anteriores fueron el B / W o cámaras a color CCD. Algunos de estos
utiliza filtros de paso de banda ópticos para aumentar el contraste, así como la luz artificial para reducir las sombras
causado por la luz solar. Otros utilizan la tecnología láser para deducir información van desde telémetros
o por triangulación, utilizando una cámara CCD. En los casos en que la fruta tenía una posición fija, como
en un cultivo de melón, también un ventilador de aire se utiliza para mejorar la visibilidad de fruta. En resumen, puede ser
declaró que estudiaron imágenes digitalizadas fueron básicamente de uno de estos tres tipos:
1. intensidad
2. espectral
3. alcance
arboles => árboles
ResponderEliminar¿sensores maging?
+2 en la primera semana